November 2014 – December 2014
2.12 – Introduction to Robotics
2.12 is an advanced undergraduate mechanical engineering course at MIT. Some of the topics taught in the course include multi-body inverse kinematics, differential motion, statics, multi-body Eulearin mechanics, multibody Lagranian mechanics, hybrid position/ force control, and compliance control. The class culminates with a final group project based off a new theme each year.
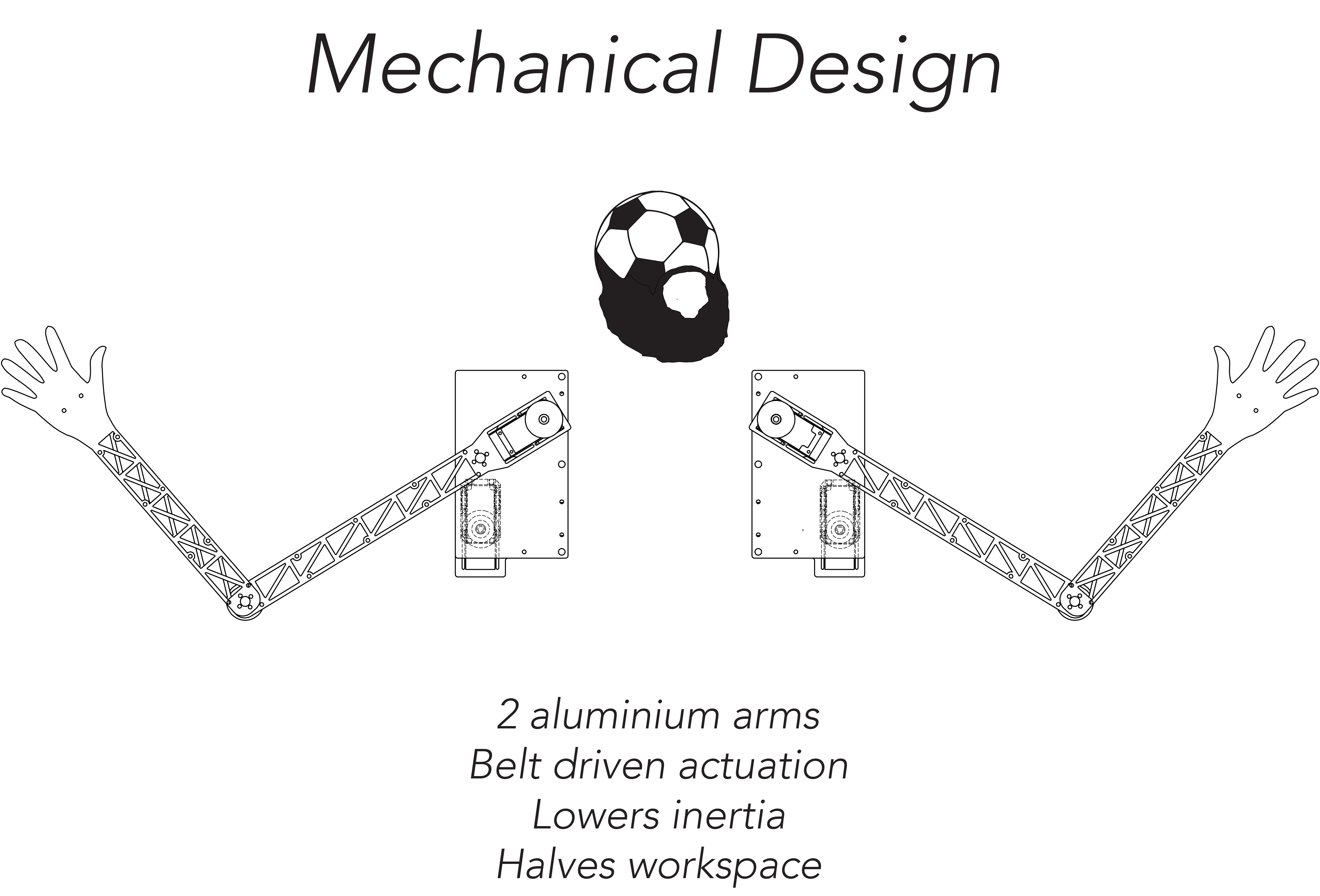
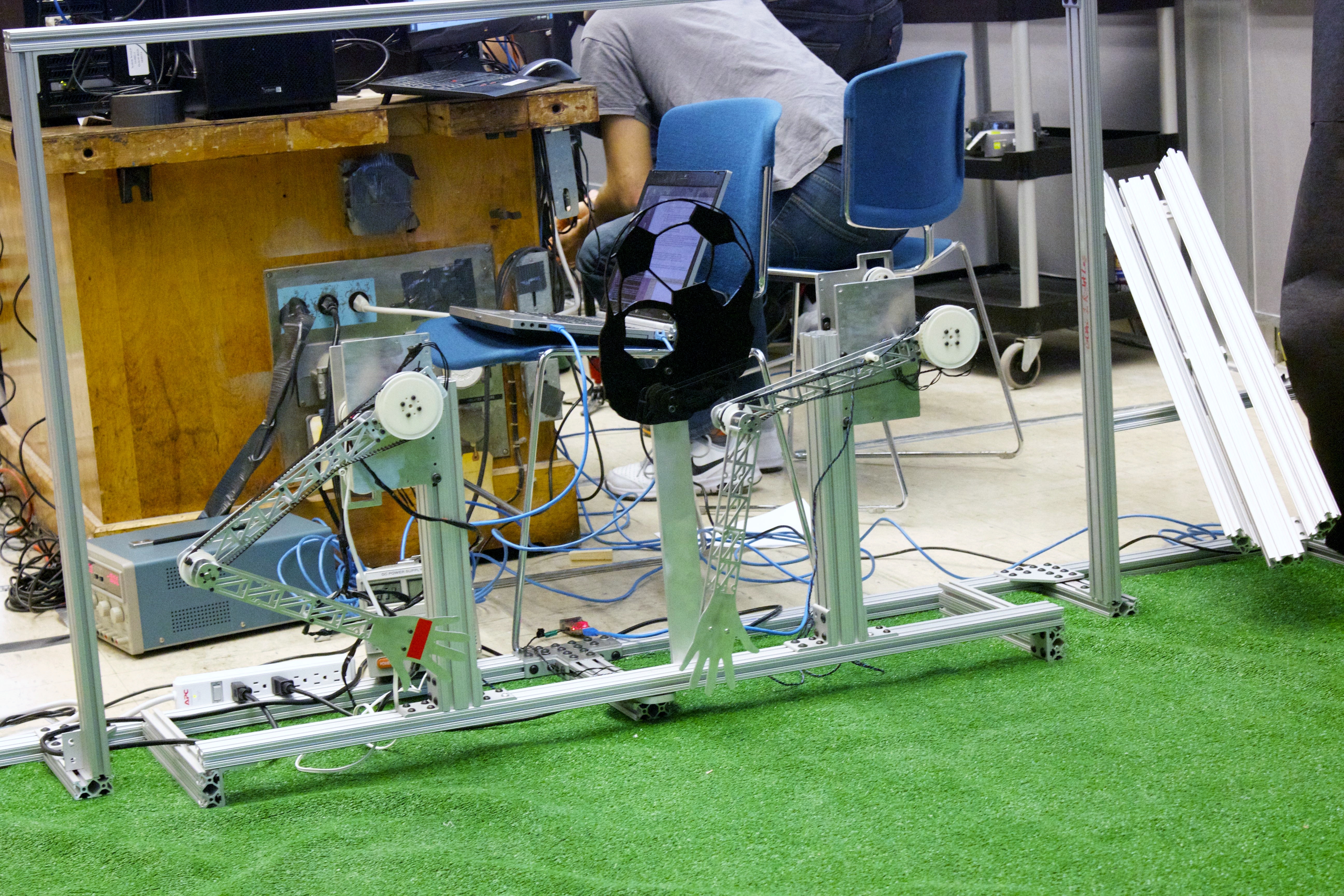
The 2014 theme for 2.12 was the World Cup. Each lab section was split into two groups, one group made a goalie robot and the other made a kicker robot. Then, all the lab sections faced off against each other in a tournament bracket to determine the winner.
My group made the winning goalie robot (which we named Tim Howard after the US goalkeeper). I worked on the design and fabrication with my friend Skyler. With only a few weeks to make the robot, we opted for a design that was quick to fabricate and assemble. We were able to go through several design iterations within this short time frame, which was one of the keys to our success in the competition.